








تأسست في عام 2001، وهي مؤسسة وطنية للتكنولوجيا الفائقة تدمج البحث والتطوير والإنتاج والمبيعات وخدمة ما بعد البيع.
ابحث عما تريد
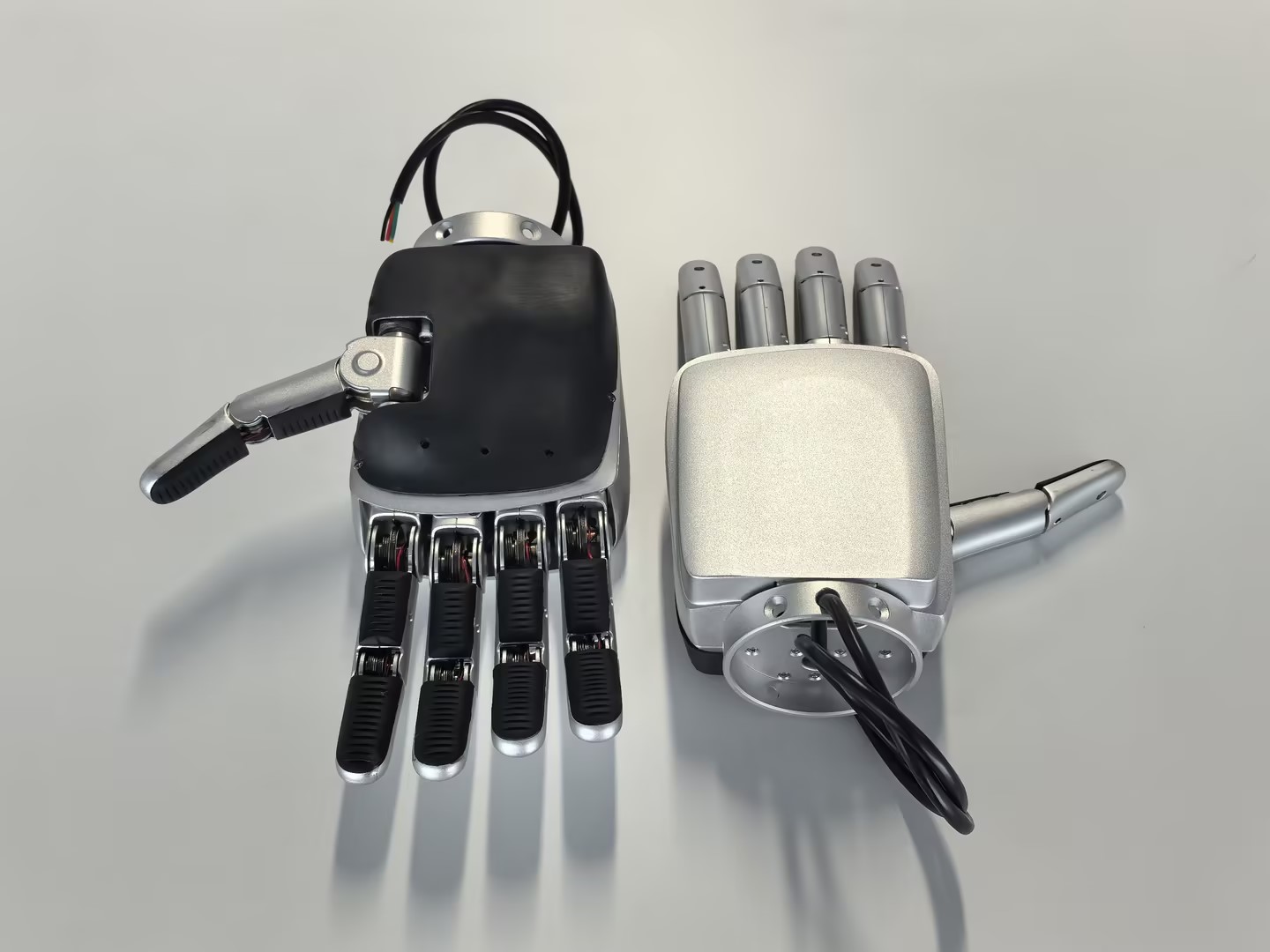
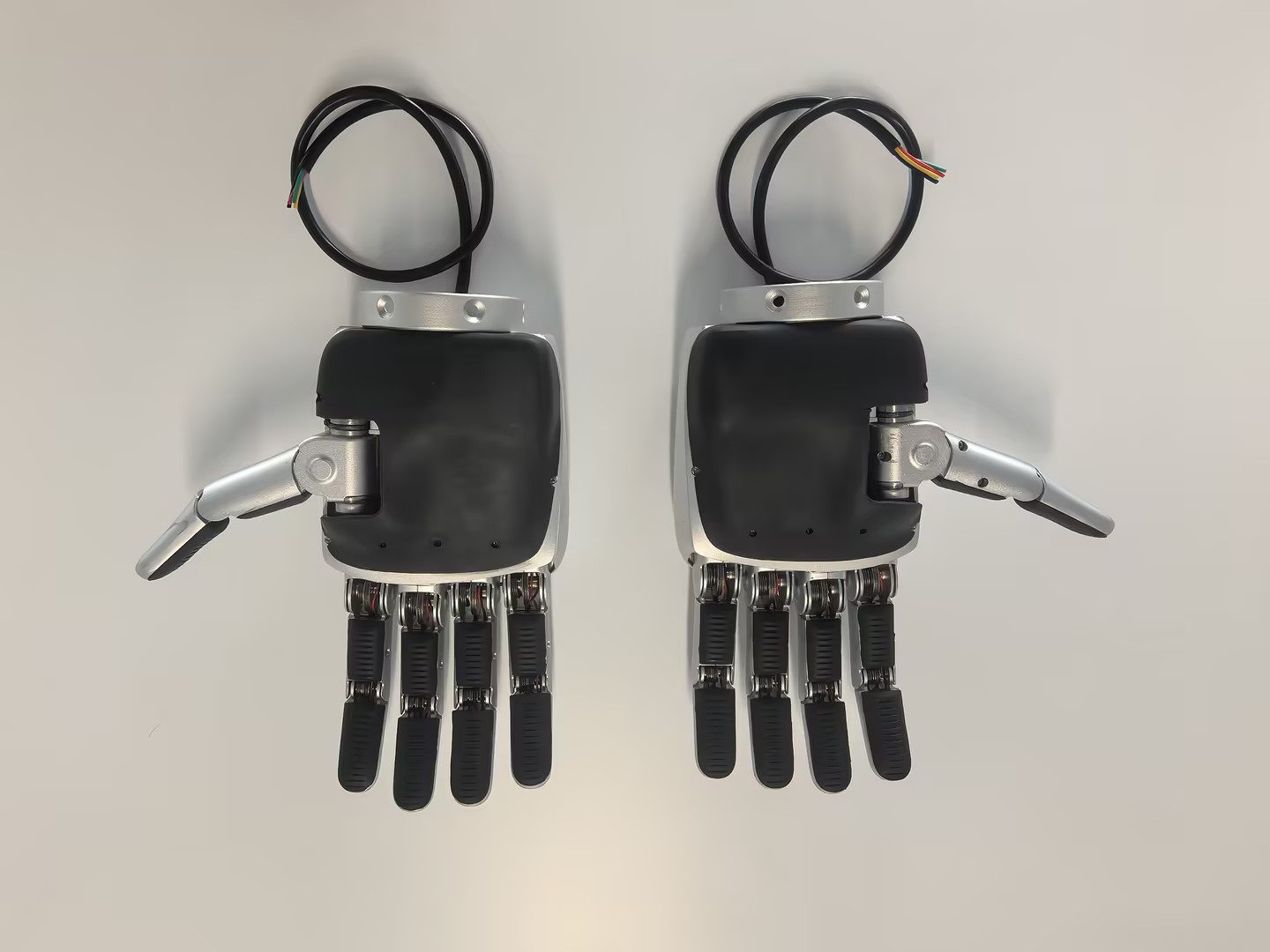
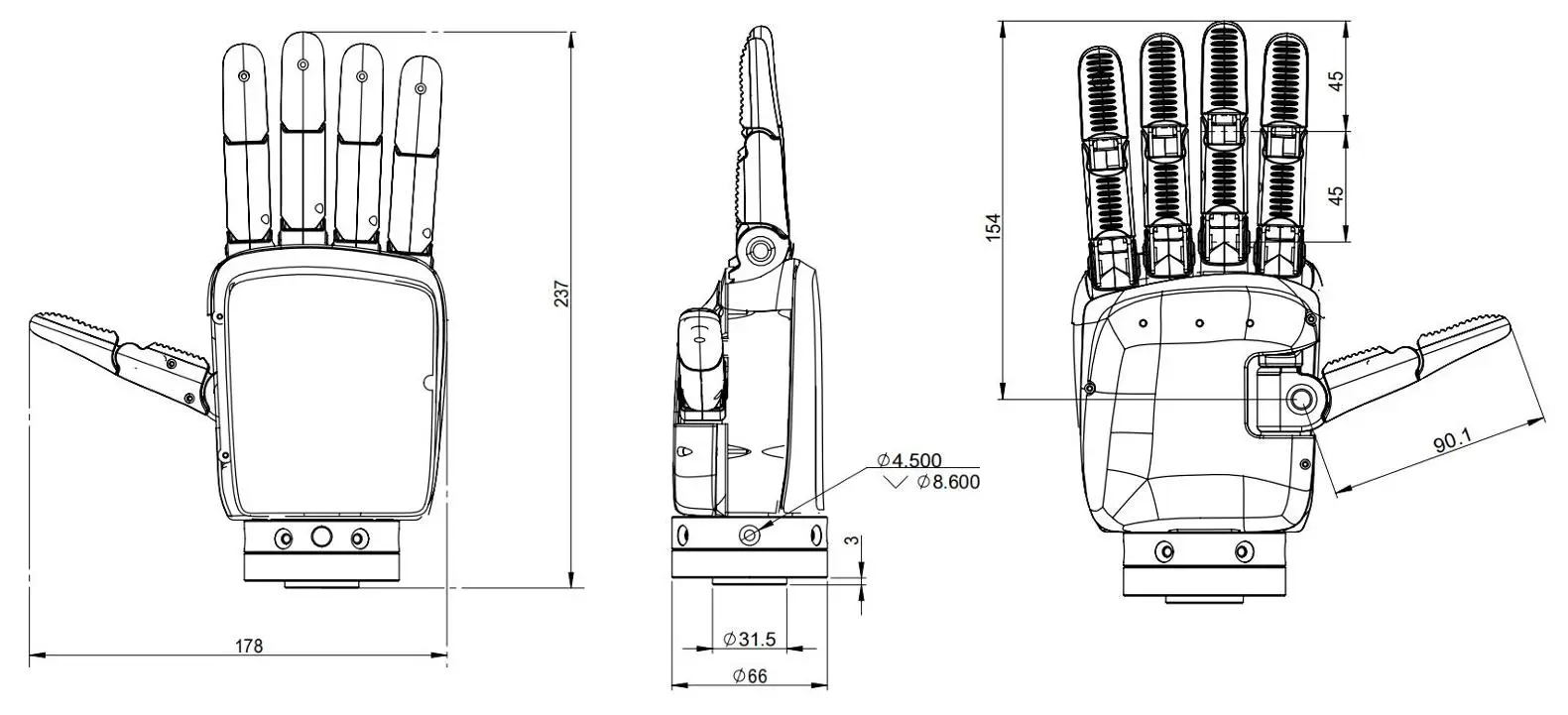
| LZ001 اليد الصناعية الحاذقة | |||
| فهرس البيانات | |||
| عدد الأصابع | 5 | دورة الحياة | 1 مليون دورة |
| درجة الحرية | 11 | جهاز استشعار ضغط الإصبع | عشرة |
| عدد من محركات الأقراص | 6 | كابل يحركها | |
| مقاومة التأثير المشترك | الدعم | جهد التشغيل | DC48V ± L0 ٪ |
| الوزن الصافي | 1.2 كجم | التشغيل الحالي | 4 ا |
| أقصى قوة معسر | 10 كجم | واجهة التحكم | Modbus485 / EtherCAT |
| LZ002 اليد الصناعية الحاذقة | |||
| فهرس البيانات | |||
| عدد الأصابع | 5 | دورة الحياة | 1 مليون دورة |
| درجة الحرية | 15 | جهاز استشعار ضغط الإصبع | خمسة |
| عدد من محركات الأقراص | 6 | محرك الربط | |
| تجتاح الوقت | 0.3 ثانية | جهد التشغيل | DC48V ± L0 ٪ |
| الوزن الصافي | 500 جم | التشغيل الحالي | 2A |
| القوة القصوى | 3 كجم | واجهة التحكم | Modbus485 / EtherCAT |
| LZ010 قفاز البيانات | |||
| فهرس البيانات | |||
| عدد من فليكس / زاوية مجسات | 10 | عدد من IMUs | 6 |
| القرار الزاوي | 0.01° | نطاق التسارع | ± 18 ز |
| دقة الموقف | ≤ 0.5° | واجهه المستخدم | USB و Ethernet |
| التواصل الكمون | ≤ 20 مللي ثانية | قفاز الوزن | 100 ± 5 جم |
| تكامل محاكاة سلس | محركات الفيزياء مثل Mujoco و Isaac Lab | مجموعة أدوات التطوير (SDK) للتطوير المخصص. | |
| تصدير البيانات | يوفر واجهات المكونات الإضافية وواجهات برمجة التطبيقات لأدوات الجهات الخارجية بما في ذلك Unity و Unreal Engine (UE) و MotionBuilder. | تشغيل البيانات | يدعم البرنامج تشغيل البيانات والاستعلام وحفظ الوظائف. وهو يدعم تنسيقات بيانات الحركة القياسية بما في ذلك BVH و FBX ، ويوفر برنامجًا |
تأسست في عام 2001، وهي مؤسسة وطنية للتكنولوجيا الفائقة تدمج البحث والتطوير والإنتاج والمبيعات وخدمة ما بعد البيع.
حقوق النشر © 2024 شركة كايلونج للتكنولوجيا العالية المحدودة
مشغل بواسطةiglobalwin.com